



Robot antropomorfo per prove di durabilità
(Pubbl. 05/11/2021)La strumentazione del laboratorio di Security & Safety si arricchisce con l’arrivo del nuovo robot antropomorfo, acquisito per effettuare prove cicliche di durabilità sui prodotti.
Durabilità s. f. [dal lat. tardo durabilĭtas -atis] è la capacità di un prodotto fisico di rimanere funzionante senza eccessive operazioni di manutenzione o riparazioni, nelle condizioni normali del suo ciclo di vita.
La valutazione delle prestazioni nel tempo può essere analizzata attraverso delle prove di laboratorio che producono sul campione un invecchiamento accelerato attraverso migliaia di cicli di funzionamento, il cui numero e/o modalità dipendono dalla tipologia e dalla destinazione d’uso del prodotto da investigare.
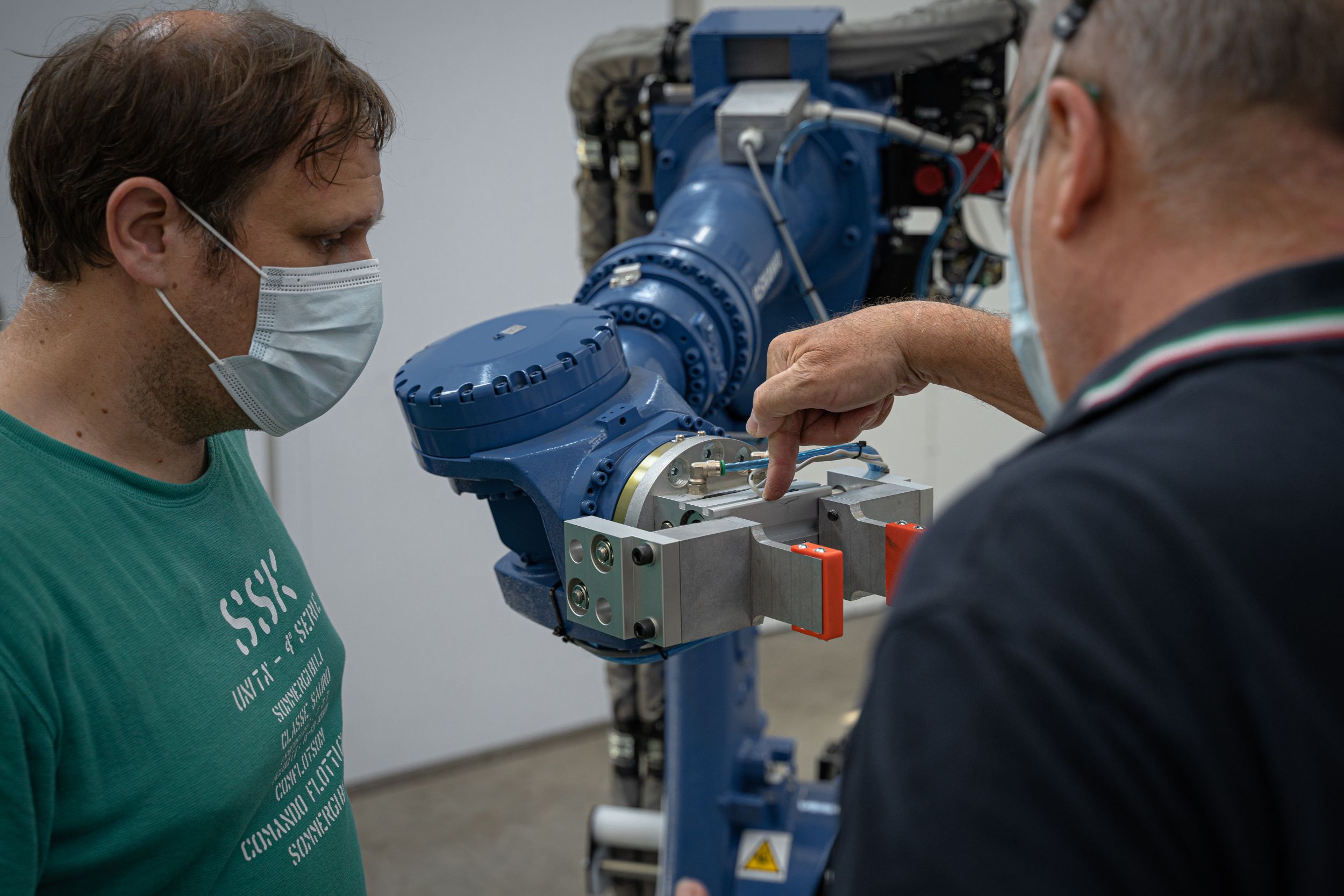
Il robot antropomorfo è un dispositivo che si presta per realizzare questo stress funzionale e operativo, simulando quasi alla perfezione un utilizzo umano nell’aprire o chiudere ripetutamente l’anta di una porta, di una finestra o di un frigorifero, oppure per fare girare in apertura o chiusura la serratura di un cancello o di un sistema di deposito.
Il robot antropomorfo, come suggerito dal nome, ricorda le fattezze umane e in particolare quelle delle braccia. Come un nostro braccio infatti, l’attrezzatura è contraddistinta da giunture, da un polso e da un dispositivo di presa paragonabile alla nostra mano.

Specifiche tecniche:
le caratteristiche principali che determinano la scelta di un robot antropomorfo sono:
- Il numero di gradi di libertà che indicano la capacità di raggiungere ogni punto dello spazio con un qualsiasi orientamento; la necessità di raggiungere i punti di uno spazio a 3 dimensioni fa si che un robot debba avere almeno tre gradi di libertà, mentre la necessità di raggiungere ogni punto con un qualsiasi orientamento rende necessari altri tre gradi di libertà: questa richiesta può essere descritta come 3 gdl per il braccio più 3 gdl per il polso; in generale quindi servono come minimo un numero di gradi di libertà pari a 6;
- la portata che ci indica il peso massimo degli oggetti che il robot può manipolare;
- lo sbraccio che indica l’area di lavoro entro la quale il robot riesce ad operare e risulta determinate nello sviluppo di un progetto applicativo; normalmente si fa distinzione tra spazio raggiungibile dove la mano può essere posta e spazio di destrezza, dove la mano può essere posta con un certo tipo di orientamento.
Il suo utilizzo principale sarà quello di valutare la durabilità di prodotti fisici soggetti a movimentazioni cicliche, come quelli raffigurati nei video seguenti: un serramento con anta apribile all’italiana e un frigorifero utilizzato nel settore automotive.


 Hai bisogno di maggiori informazioni sui nostri servizi?
Hai bisogno di maggiori informazioni sui nostri servizi?
Istituto Giordano
P.Iva 00549540409 - Privacy & Cookie Policy - Preferenze Cookie
Via Rossini, 2 - 47814 Bellaria (Rn)
- Tel. +39 0541/343030
2017 © Copyright Istituto Giordano S.p.A. All rights reserved
P.Iva 00549540409 - Privacy & Cookie Policy - Preferenze Cookie
Via Rossini, 2 - 47814 Bellaria (Rn)
- Tel. +39 0541/343030
2017 © Copyright Istituto Giordano S.p.A. All rights reserved
Credits TITANKA! Spa