



Anthropomorphic robot for durability testing
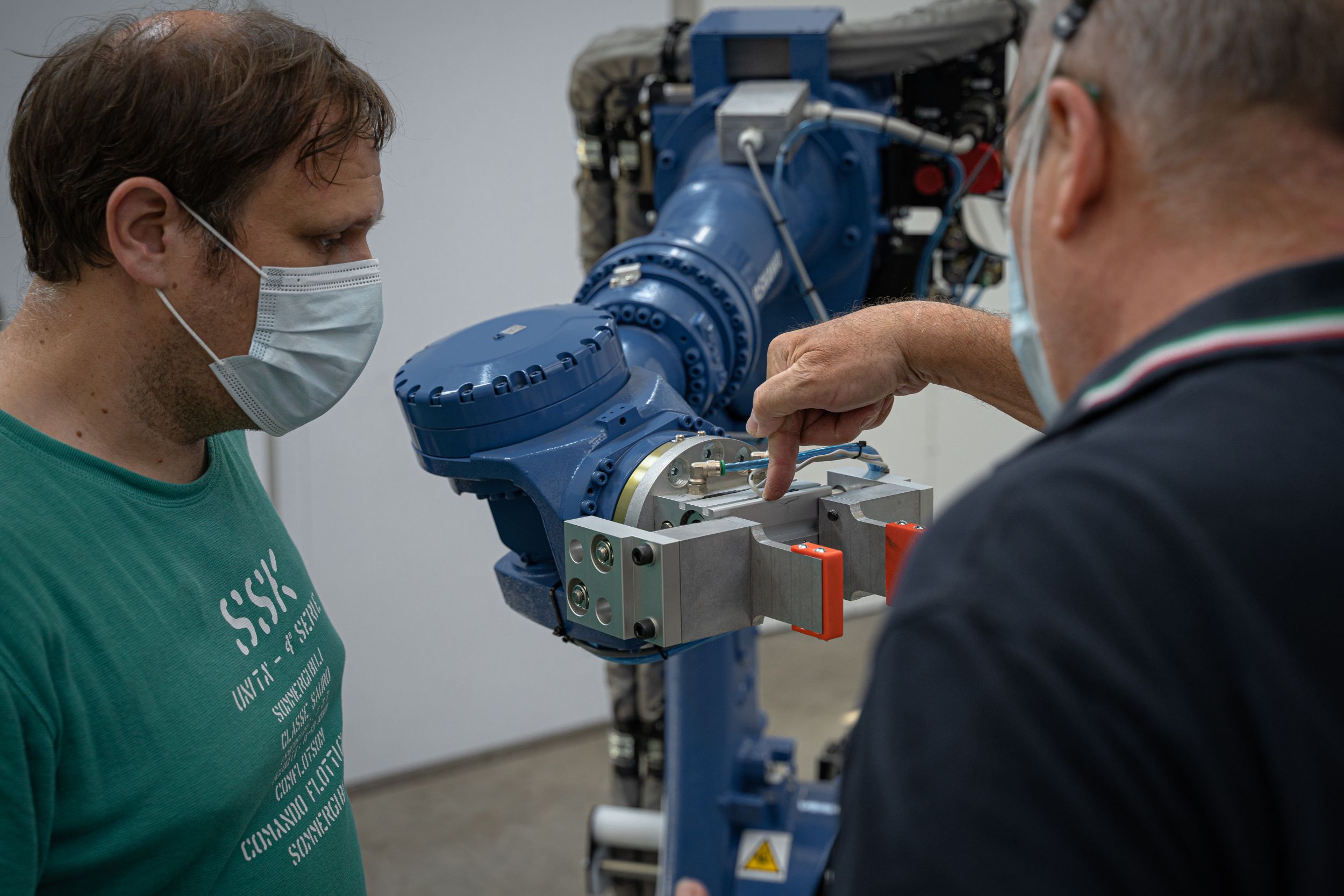
(Pubbl. 05/11/2021)The instrumentation of the Security & Safety laboratory has been enhanced with the arrival of a new anthropomorphic robot, acquired to perform cyclical durability tests on products.
Durability (n. f.) [from late Latin durabilĭtas -atis] is the ability of a physical product to remain operational without excessive maintenance or repairs under the normal conditions of its life cycle.
The evaluation of performance over time can be analyzed through laboratory tests that subject the sample to accelerated aging by simulating thousands of operating cycles. The number and/or method of these cycles depend on the type and intended use of the product under investigation.
The anthropomorphic robot is a device designed to perform this functional and operational stress testing, closely simulating human use. It can repeatedly open and close the door of a window, refrigerator, or door, or rotate the lock of a gate or a deposit system in both opening and closing motions.
The anthropomorphic robot, as its name suggests, resembles human features, particularly the arms. Like a human arm, the equipment is characterized by joints, a wrist, and a gripping device comparable to a human hand.

Technical Specifications:
The main characteristics that determine the choice of an anthropomorphic robot are:
- The number of degrees of freedom, which indicate the ability to reach any point in space with any orientation. To access points in a three-dimensional space, a robot must have at least three degrees of freedom. Additionally, to reach each point with any orientation, three more degrees of freedom are required. This requirement can be described as three degrees of freedom for the arm plus three for the wrist. In general, a minimum of six degrees of freedom is needed.
- The payload capacity, which indicates the maximum weight of objects the robot can handle.
- The reach, which defines the working area within which the robot can operate and is crucial in the development of an application project. Typically, a distinction is made between the reachable space, where the hand can be positioned, and the dexterity space, where the hand can be positioned with a specific orientation.
Its primary use will be to assess the durability of physical products subjected to cyclic movements, such as those shown in the following videos: a window with an Italian-style opening sash and a refrigerator used in the automotive sector.
FOCUS EVIDENCE










 Do you need more information about our services?
Do you need more information about our services?
Istituto Giordano
P.Iva 00549540409 - Privacy & Cookie Policy - Cookie preferences
Via Rossini, 2 - 47814 Bellaria (Rn)
- Tel. +39 0541/343030
2017 © Copyright Istituto Giordano S.p.A. All rights reserved
P.Iva 00549540409 - Privacy & Cookie Policy - Cookie preferences
Via Rossini, 2 - 47814 Bellaria (Rn)
- Tel. +39 0541/343030
2017 © Copyright Istituto Giordano S.p.A. All rights reserved
Credits TITANKA! Spa